
















CS機器人生成ml文件以及微段插補的使用
1.簡介
本文將介紹如何使用腳本獲取當前位置生成ml文件,使用插件進行微段插補運動。主要運用于對軌跡要求順滑的場景,例如涂膠。
2.操作流程
1.導入腳本
下載下方鏈接的腳本文件,使用U盤導入機器人。
getpoes.script
2.機器人程序
1.在 配置-全局變量 里聲明一個名為 flag 的變量。
2.按圖中的方式,在現有的程序里添加程序行。flag = 1 ; flag = 2 ; 等待 flag ?= 3 ,添加線程將getpoes腳本放到線程節點下。
flag = 1 是開始記錄點位,flag = 2 是結束記錄點位,flag ?= 3 是等腳本運行完成。

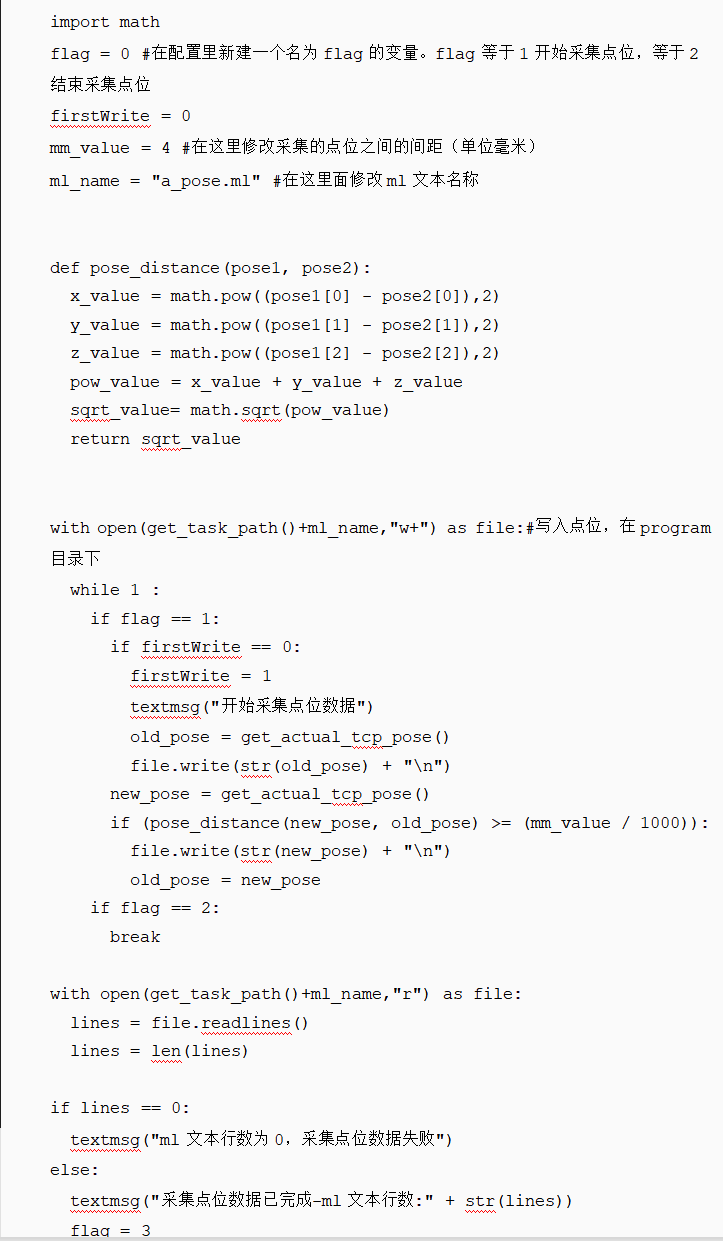
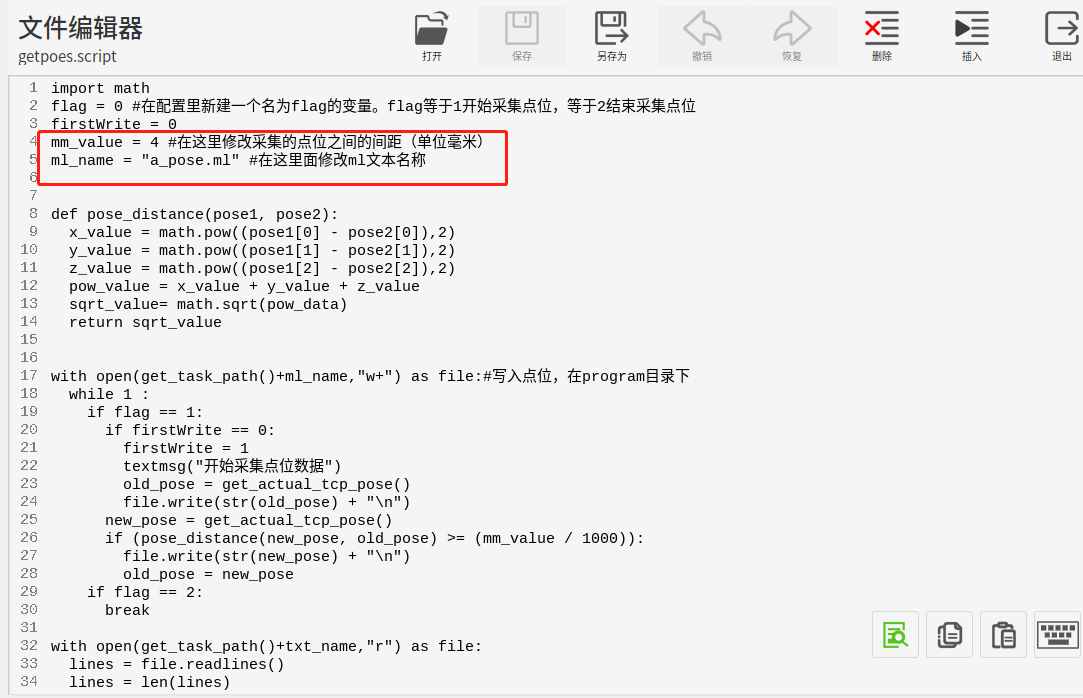
3.腳本說明:可在紅框處修改采集的點位間距和ml文件的名稱。
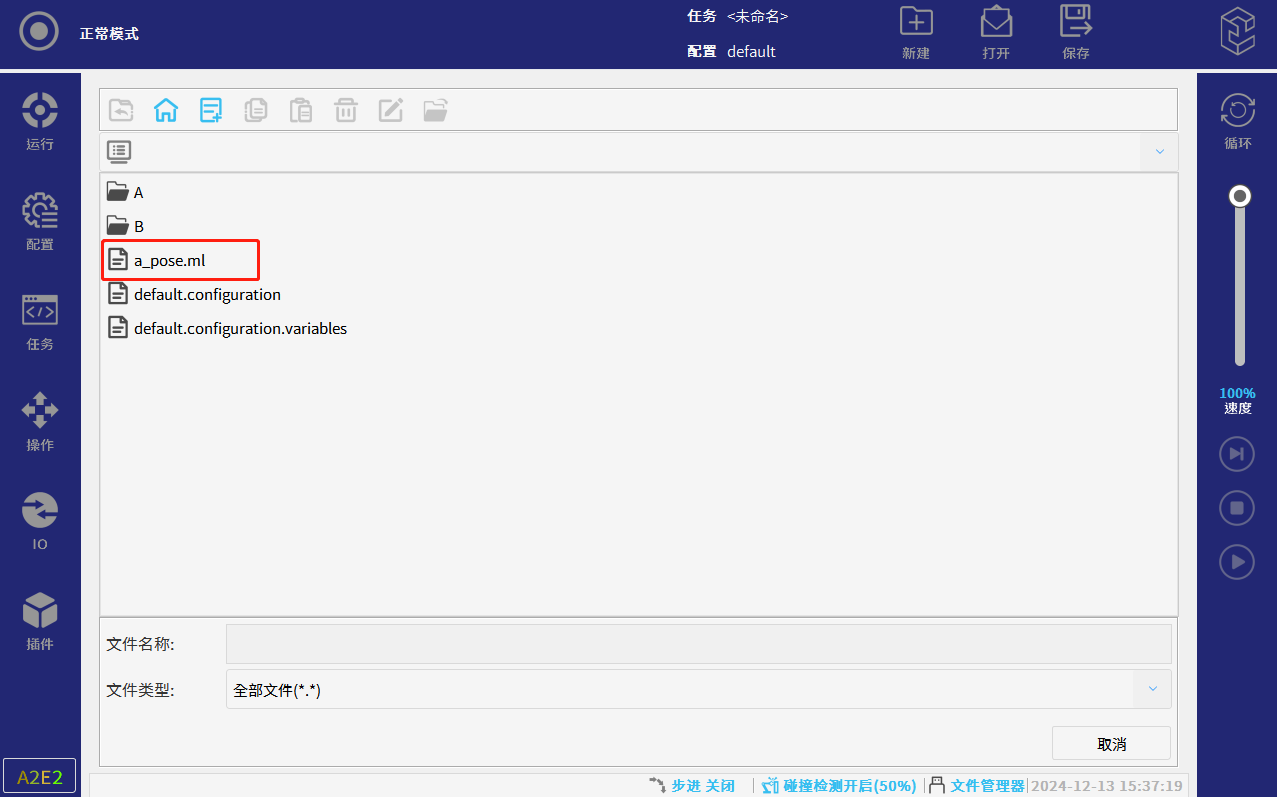
4.執行機器人程序,機器人的運行速度百分比可以調到20%以下。執行完成后,會在在如圖片所示的目錄下生成一個.ml后綴的文件。
5.注意,如果需要生成多個ml文件,就需要在腳本文件里修改ml文件的名稱。不修改的話,會覆蓋原有的ml文件。
3.使用插件
1.插件文件:remotetcp-1.2.9.0.elico
2.在紅框處,點擊選擇添加.ml后綴的文件。時間間隔,ml文件中兩個點位之間的時間間隔,間隔越短運行速度越快。

4.在機器人程序中使用微段插補
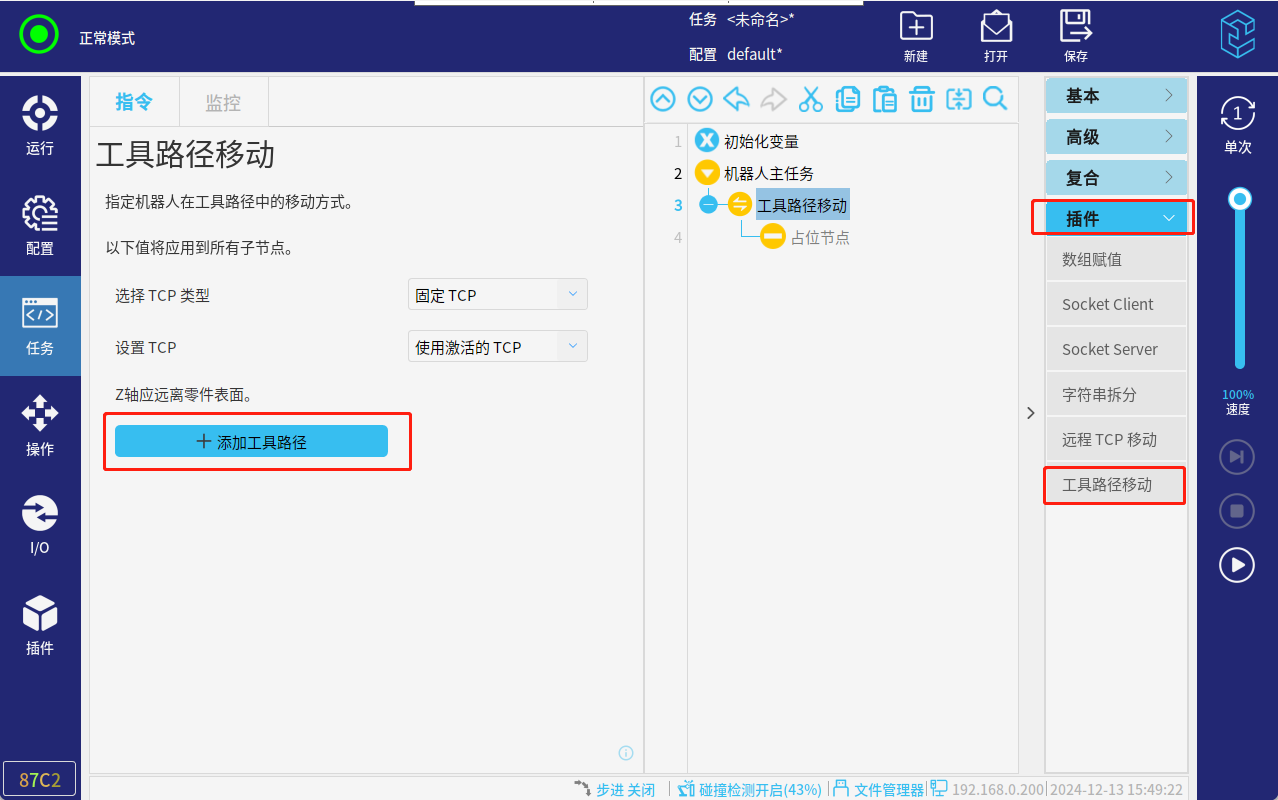
1.在插件目錄下,找到工具路徑移動,點擊添加工具路徑
2.在運行離線文件處,可以修改ml文件一共要運行幾行,從第幾行開始運行。點擊添加自動運行腳本移動至起始點位,運行程序時,會運動到ml文件中起始行的位置。

3.以上操作完成后,就可以運行程序了。初次運行,速度百分比調低一點,插件參數設置的不對,運行過程中可能會有抖動。
3.常見問題解答
1.微段插補實際運行過程中有抖動
可以在插件里修改時間間隔,把時間間隔改大一些。ml文件中兩點之間,間隔越大運行速度越快。插件中的時間間隔,間隔越大運行速度越慢。


























