
















CS機器人進入恢復模式的處理方法
2025-05-28
1. 簡介
本文簡單介紹CS機器人在進入恢復模式時該如何操作,有兩種情況會進入到恢復模式中,一種是機器人在運行過程中速度過快關節超過了極限位置進入恢復模式,一種是在配置了安全平面時機器人末端TCP超過了安全平面
2. 操作流程
2.1在運行中關節進入恢復模式
在運行中機器人速度過快超過關節極限
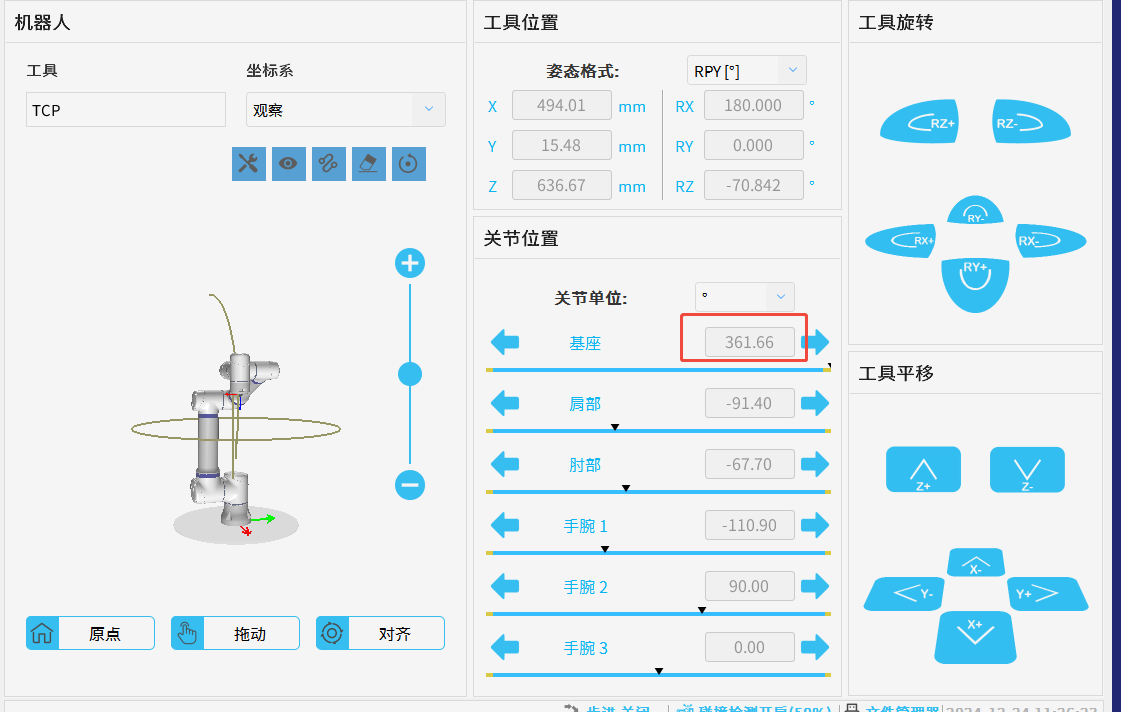

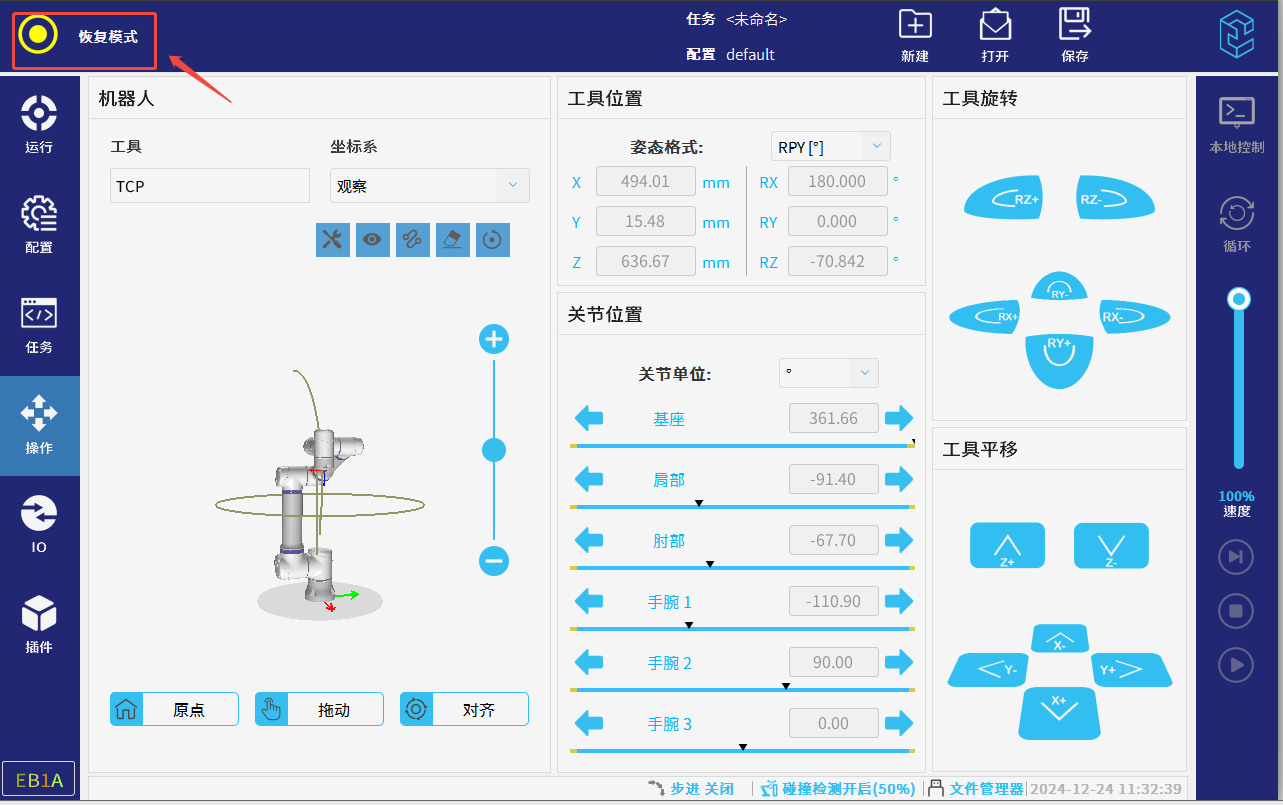
此時機器人就會進入恢復模式,只需要查看機器人對應的關節位置,把相應的關節移動至關節范圍內即可操作方法如下

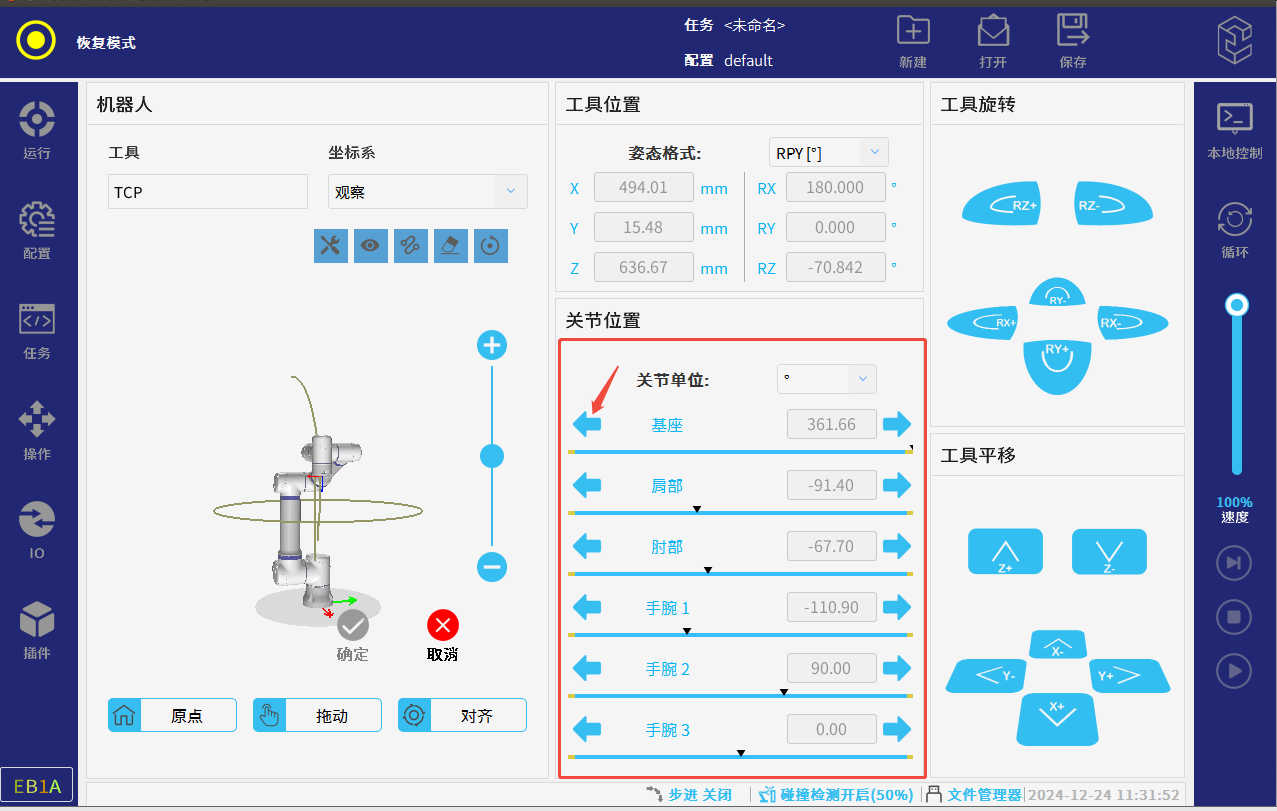

此時機器人的基座已經在關節限制內,左上角恢復正常模式,點擊確定按鈕即可退出恢復模式
2.2在安全平面中進入恢復模式
機器人末端TCP超過安全平面時會進入到恢復模式;正常情況下機器人會在接近安全平面時就會暫停運行,此時會進入保護性停止,機器人會暫停程序,此時只需點擊啟用機器人即可
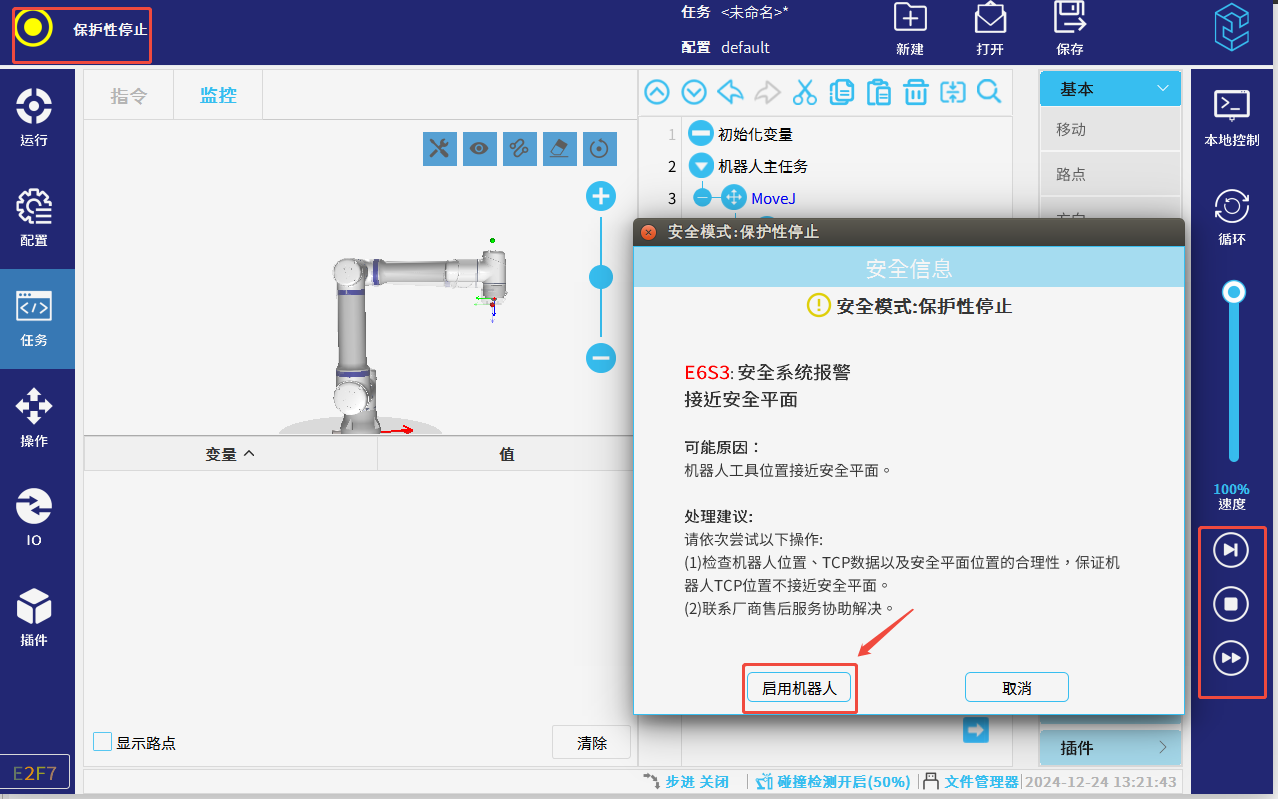
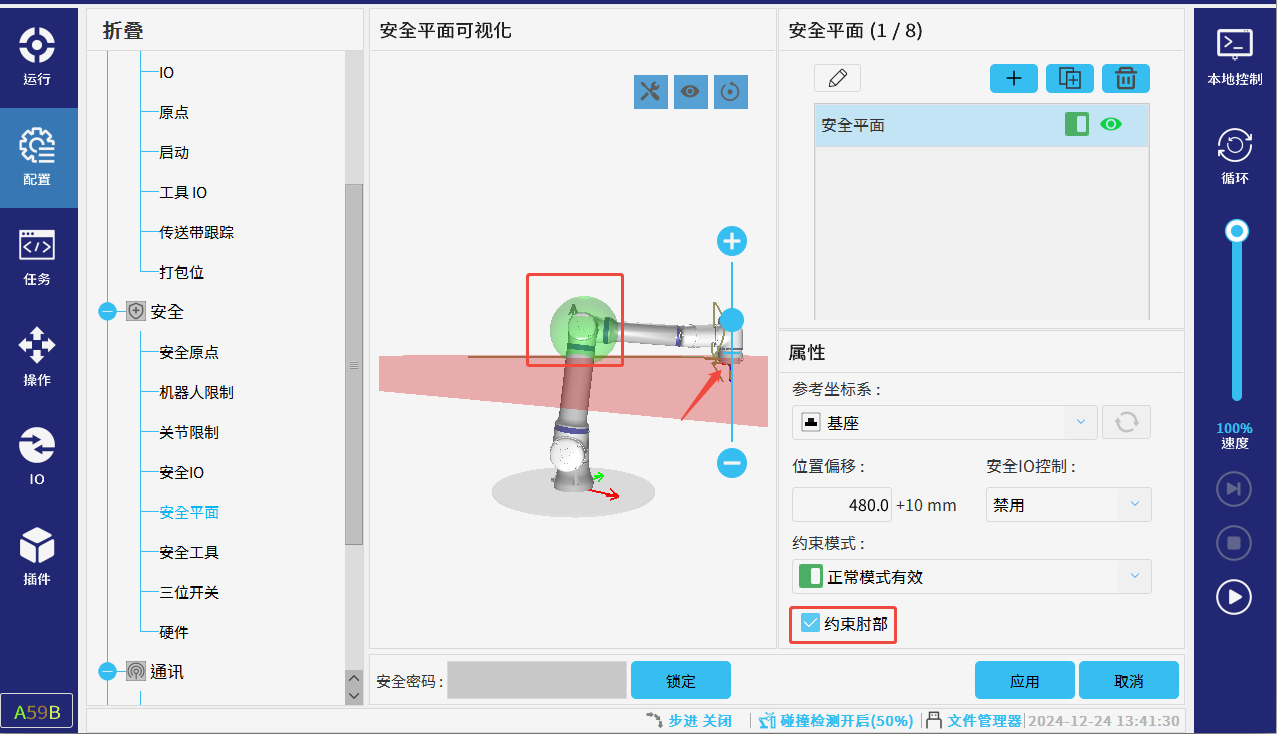
當機器人速度過快超過安全平面時此時就會進入到恢復模式如下圖

設置安全平面時可以選擇勾選或者不勾選“約束肘部”(勾選了會在肘部有個球體),如果勾選了則需要把肘部連同末端TCP一同脫離安全平面,如果沒有勾選則只需要把末端TCP脫離安全平面,操作方法如同2.1
3. 常見問題解答


























