
















EC機器人程序原點設置及信號輸出
2024-11-04
1. 程序原點介紹
程序原點是程序的起始位置。它可以通過確保機器人從已知位置啟動來防止對外圍設備的干擾。
2. 操作流程
1. 機器人軟件版本 v3.0之上
2. 將機器人移動到所需的程序起始位置。導航到運行準備 -> 零點設置 -> 程序原點,按“設置”按鈕,將機器人當前位置設置為程序原點

當機器人位于程序原點位置時,虛擬輸出 M401 的值為 1。程序原位可根據(jù)生產(chǎn)線要求設置使用。
3. 常見問題解答
3.1 程序中調用程序原點
打開程序,將機器人移動到所需的程序起始位置,使用移動指令(movj ,movl,movc等)記錄當前點位。
3.2 程序原點信號使用數(shù)字io輸出
機器人進入管理員權限(密碼:333333),導航到擴展 -> 用戶PLC,使用梯形圖關聯(lián)M401和需要輸出的數(shù)字IO

3.3 使用總線通訊讀取程序原點狀態(tài)
1. modbus協(xié)議:M401線圈地址0x191,使用 0x01,0x03,0x04功能碼
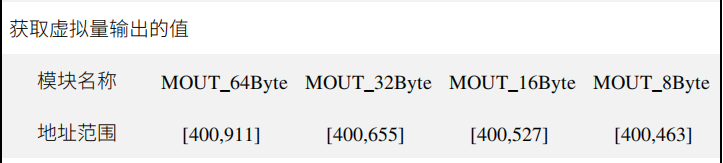
2. profinet協(xié)議:程序原點M401信號,可使用MOUT_64Byte,MOUT_32Byte,MOUT_16Byte,MOUT_8Byte模塊
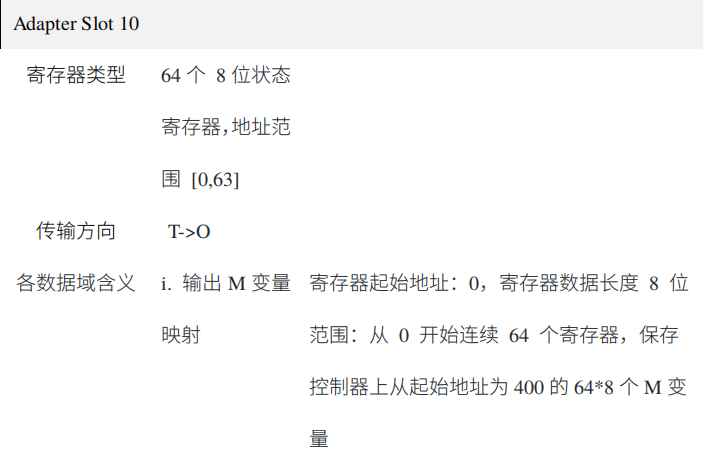
3. Ethernet/IP協(xié)議:程序原點M401信號,可讀取Adapter Slot 10



資源中心























